


Introduzione al materiale PEEKSensori robotici
Il PEEK (Polietereterchetone) è una plastica ingegneristica speciale ad alte prestazioni con proprietà quali resistenza alle alte temperature (temperatura di esercizio a lungo termine intorno ai 240 °C), resistenza alla corrosione chimica, elevata resistenza, leggerezza, basso coefficiente di attrito ed eccellente isolamento elettrico. Questi vantaggi lo rendono un materiale ideale per componenti chiave dei sensori robotici, risolvendo i limiti dei tradizionali sensori in metallo o in plastica ordinaria in termini di precisione, stabilità e adattabilità ambientale.
I. Tipi e caratteristiche delle applicazioni principali
Il materiale PEEK viene utilizzato principalmente per la produzione di componenti strutturali principali o substrati funzionali di sensori. Le applicazioni più comuni sono le seguenti:
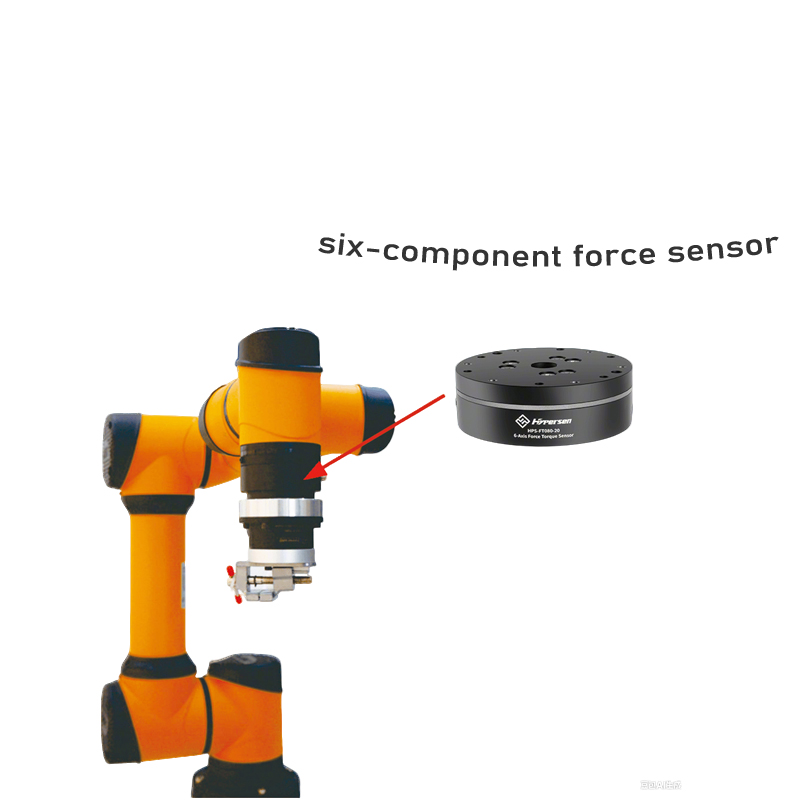
1. Sensori di forza/coppia a sei dimensioni
Parte applicativa: il corpo elastico (il componente principale per la percezione del segnale di forza) del sensore.
Valore fondamentale: i corpi elastici tradizionali sono realizzati principalmente in lega di alluminio, mentre il PEEK ha un rapporto migliore tra modulo elastico e densità, garantendo resistenza strutturale e riducendo significativamente la massa del corpo elastico, riducendo al minimo l'interferenza inerziale durante il movimento del robot e migliorando la precisione della misurazione della forza (fino a ±0,1% FS) e la velocità di risposta dinamica (tempo di risposta < 1 ms).
Scenari tipici: assemblaggio di robot industriali (ad esempio, controllo preciso della forza di serraggio delle viti), interazione collaborativa tra robot e macchina (ad esempio, percezione della forza di collisione), feedback della forza chirurgica di robot medici (ad esempio, monitoraggio della forza di rettifica della superficie ossea nei robot ortopedici).

2. Sensori tattili/di sforzo
Parte di applicazione: substrato flessibile o supporto dell'elettrodo del sensore.
Valore fondamentale: il PEEK ha una certa flessibilità e resistenza alla fatica, che gli consentono di essere lavorato in forme sottili o irregolari, adatte a scenari di contatto curvi o flessibili come dita e pinze dei robot; allo stesso tempo, il suo isolamento elettrico può prevenire interferenze di segnale, garantendo la stabilità dei dati tattili (come pressione, riconoscimento della consistenza) o di deformazione (come deformazione delle giunzioni).
Scenari tipici: percezione della pressione nei robot di servizio quando afferrano oggetti fragili (come vetro, frutta), monitoraggio della deformazione per l'adattamento nell'assemblaggio flessibile dei robot industriali.
3. Sensori specializzati per ambienti corrosivi
Parte di applicazione: l'alloggiamento, il manicotto di protezione della sonda o i componenti di contatto del sensore.
Valore fondamentale: il PEEK ha una resistenza estremamente elevata agli acidi, agli alcali, ai solventi organici e al vapore ad alta temperatura (come la pulizia CIP nell'industria alimentare), di gran lunga superiore all'acciaio inossidabile o alle normali materie plastiche, proteggendo i componenti interni del sensore dalla corrosione e prolungandone la durata.
Scenari tipici: sensori di livello/concentrazione dei liquidi nei robot alimentari/medici (ad esempio per il monitoraggio del livello dei liquidi nei serbatoi delle salse), sensori di parametri ambientali nei robot chimici (ad esempio per la protezione delle sonde di rilevamento dei gas corrosivi).
II. Vantaggi principali rispetto ai materiali tradizionali

III. Campi di applicazione tipici
Robot industriali: controllo della forza di assemblaggio, feedback della forza di rettifica, monitoraggio della pressione di presa;
Robot medici: percezione della forza degli strumenti chirurgici (come il feedback di forza nelle operazioni laparoscopiche), monitoraggio della deformazione articolare dei robot riabilitativi;
Robot speciali: sensori ambientali resistenti alla corrosione nei settori alimentare/chimico, sensori di temperatura/forza in condizioni di alta temperatura (come la saldatura automobilistica).









